Holtpontos navigáció (dead reckoning) — meghatározás és alkalmazások
Holtpontos navigáció (dead reckoning) — meghatározás és alkalmazások: hogyan becsülik a pozíciót GPS-hiányban, történelmi gyökerek és modern tengeri, légi és szárazföldi felhasználások.
A holtpontos navigáció (angolul Dead Reckoning, röviden DR) a pozíció becslésének olyan módszere, amely az utolsó ismert helyzetből (fixpont) indul ki, és a azóta mért sebesség, menetirány és az eltelt idő alapján számítja ki az aktuális pozíciót. Alapvetően integráljuk a jármű vagy személy sebességvektorát az idő függvényében, így kapjuk meg a megtett helyzetváltozást. A módszer egyszerű megfogalmazásban: új_pozíció = régi_pozíció + sebesség × idő.
Képgaléria
3 Képek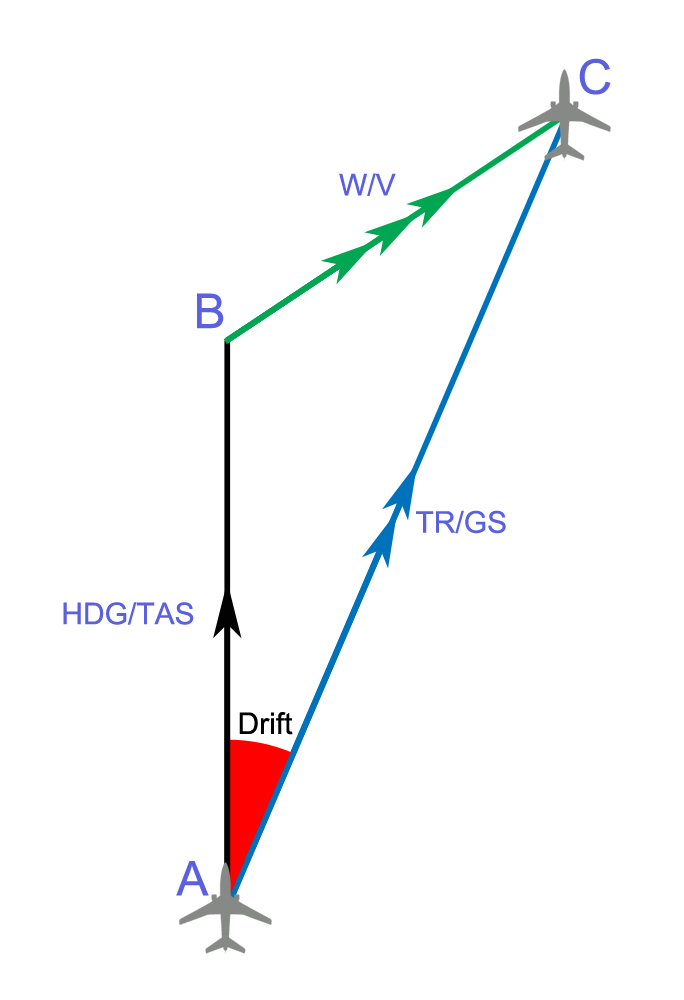


Hogyan működik a gyakorlatban?
A holtpontos navigáció különböző mérőeszközökre támaszkodik, például:
- sebességmérők (hajóknál log, szárazföldi járműveknél kerékfordulatszám-érzékelők / odometria),
- iránytűk és magnetométerek (vagy giroszkópok a pontos iránymeghatározáshoz),
- inercialis mérőrendszerek (IMU: gyorsulásmérők és giroszkópok) a rövidebb távú sebesség- és irányváltozások integrálásához,
- további kiegészítők: Doppler-gyorsaságmérők, vizuális odometria (kamerákból), radar vagy LIDAR-alapú sebesség/pozícióbecslés.
A gyakorlati számítás során az időben egymás után rögzített sebesség- és iránymérésekből lépésenként frissítjük a pozíciót. Elektronikus rendszerekben ez folyamatos numerikus integrálást jelent.
Hibák és korlátok
A DR fő gyengesége az, hogy a hibák felhalmozódnak: minden mérési hiba, szenzor-drift vagy becslési pontatlanság idővel növekvő eltérést okoz a valós pozíciótól. Tipikus hibaokok:
- gyorsulásmérők és giroszkópok kis eltolódásai (bias), amelyek integrálódva egyre nagyobb pozícióhibát eredményeznek;
- kerékcsúszás vagy terepadottságok miatt hibás odometria;
- iránymeghatározás pontatlansága (pl. mágneses zavarok az iránytűnél);
- numerikus integrációs approximációk és mintavételi időközök.
A gyakorlatban ezért a holtpontos navigációt rendszeresen korrigálni kell külső referencia segítségével (például GPS-fix, part menti ismert pontok, csillagmegfigyelés, vizuális mérföldkövek), különben a pozícióhiba gyorsan elfajul.
Hiba csökkentése és modern megoldások
A mai rendszerek gyakran több forrást kombinálnak (szenzor-fúzió), és ezeket valós idejű algoritmusokkal, például Kalman-szűrővel kezelik, hogy minimalizálják a hibákat. Gyakori megoldások:
- GPS vagy más műholdas helymeghatározó rendszerek (lásd: globális helymeghatározó rendszert) által szolgáltatott fixpontok időszakos bevitele a DR frissítésére;
- zero-velocity update (ZUPT) technikák, amikor egy jármű egy rövid időre biztosan áll — ez segít az IMU driftjének kiküszöbölésében;
- map matching (térképre igazítás) és látási alapú korrekciók (kamerák, LIDAR) autonóm járműveknél;
- hibadetektálás és redundáns szenzorok a megbízhatóság növelésére.
Alkalmazási területek
A holtpontos navigációt vagy annak elvét ma is széles körben alkalmazzák, többek között:
- tengeri és légi navigáció: történelmileg a tengerészek és pilóták DR segítségével tartották nyomon helyzetüket, különösen amikor nem voltak látható landmárkák vagy nem állt rendelkezésre pontos idő/földrajzi hosszúság meghatározás;
- alapvető tartalék navigáció: a GPS-kiesés idején DR biztosít átmeneti pozícióbecslést (például ha a GPS műholdak sérülnek vagy a jel blokkolva van, akár napkitörés esetén);
- alkalmazások szárazföldön: önvezető járművek, robotok, UAV-k (dronok) — a DR és szenzor-fúzió egymást kiegészítve növeli a folytonosságot és megbízhatóságot;
- taktikai és katonai rendszerek, ahol a GPS-sel szembeni függést csökkenteni kell;
- búvár- és szubmarin navigáció: víz alatt, ahol a műholdas jel nem hozzáférhető, az inercia rendszerek és holtpontos elv nyújtanak navigációs információt;
- történelmi navigáció: a felfedezők korában (például a Kolumbusz Kristóf említésével kapcsolatos korszakban Kolumbusz Kristóf az Újvilágba érkezett) a DR, a csillagmegfigyelés és a szélesség meghatározása (szélesség) voltak a tájékozódás fő eszközei, mielőtt pontos órákat fejlesztettek a hosszúság-meghatározáshoz (hosszúság és pontos órák problémája).
Történeti példa
A holtpontos módszert széles körben használták a nagyhajózó korokban, és ez szerepet játszott a polgári repülés korai sikereiben is. A nemzetközi repülés történetéből ismert példa, hogy 1926-ban Richard Byrd bejelentette, hogy elrepült az Északi-sark fölött; ilyen hosszú, jel nélküli repülések során a pilóták DR-t és csillagmegfigyelést használtak az iránytartáshoz és a visszatéréshez.
Összefoglalás
A holtpontos navigáció egyszerű és fontos alapelv: az utolsó ismert helyzetből kiindulva, a mozgás mérésével becsüljük meg az aktuális pozíciót. Bár a modern világban a GPS és egyéb műholdas rendszerek gyakran elsődlegesek, a DR továbbra is alapvető szerepet játszik, mint tartalék- vagy kiegészítő eljárás, különösen olyan környezetekben, ahol a műholdas jel nem rendelkezésre áll vagy megbízhatatlan. A mai megoldások a DR-t szenzorfúzióval, IMU-kkal és matematikai szűrőkkel kombinálják, hogy csökkentsék a hibákat és növeljék a navigáció megbízhatóságát.

Módszer
A holtidőszámítás egy ismert pontból (a fixpontból) indul. Ezután ismerni kell a jármű sebességét. A régi időkben a hajók egy fatörzset dobtak át a parton (kötélhez kötve), és számolták, mennyi időbe telik, amíg ez a fatörzs áthalad (vagy egy csomókkal ellátott kötelet húztak, és számolták, hány csomót húznak ki egy bizonyos idő alatt). Ez adná meg a hajó sebességét. Az irányt egy iránytűből ismerve megadnánk az irányt. Ebből a két számból becslést (jó tippet) lehetne adni a jármű jelenlegi helyzetéről. A szél azonban a járművet az egyik oldalra tolja (ezt nevezzük sodródásnak), így ezt is meg kell mérni. A vízben áramlatok is vannak, még az óceán közepén is. Idővel ez is hibákat okozhat, ezért az áramlatok korrigálására térképeket készítettek.
A repülőgépek könnyen meg tudják mérni a szélsebességüket (milyen gyorsan haladnak a levegőben), de azt nem, hogy milyen gyorsan mozognak a föld felett (ezt nevezik földi sebességnek). Az ellenszél, hátszél vagy oldalszél megváltoztatja a földi sebességet. Ha a repülőgép magassága ismert, akkor a földi sebességet úgy lehet meghatározni, hogy megmérjük, milyen gyorsan halad el a repülőgép egy földi tárgy mellett. (Minél magasabban vagyunk, annál lassabbnak tűnik a talaj mozgása). A repülőgép padlóján lévő ablak segítségével meg lehet találni a földi sebességet és a repülőgép sodródását.
A földön álló jármű is használhatja a holtpont-meghatározást. Általában nem kell aggódniuk a szél okozta sodródás miatt, és a szárazföldön nincsenek áramlatok, így ez a számítás könnyebb.
Kérdések és válaszok
K: Mi az a Dead Reckoning?
V: A Dead Reckoning (vagy DR) a pozíció becslésének módszere az utolsó ismert pont, sebesség és mozgásirány felhasználásával.
K: Mire használják a Dead Reckoningot?
V: A Dead Reckoningot egy hajó, repülőgép vagy jármű helyzetének követésére használják.
K: Miért nem használják mostanában annyira a Dead Reckoningot?
V: A navigációhoz ma már a globális helymeghatározó rendszert (GPS) használják, így a Dead Reckoning kevésbé fontos.
K: Milyen helyzetekben hasznos még a Dead Reckoning?
V: A Dead Reckoning hasznos olyan területeken, ahol a GPS nem áll rendelkezésre, vagy rövid ideig, ha a GPS-frissítés kimarad.
K: Miért fontos tudni a Dead Reckoningról?
V: A Dead Reckoning ismerete fontos abban az esetben, ha a GPS műholdak megsérülnek vagy a berendezés elveszik, így a hajósok és a pilóták továbbra is tudnak navigálni.
K: Hogyan térképezték fel a világot a tengerészek, miután Kolumbusz Kristóf az Újvilágba érkezett?
V: A hajósok a Dead Reckoninget és a csillagokat használták a szélességi fokok meghatározásához és a világ feltérképezéséhez.
K: Hogyan lett Richard Byrd az első ember, aki elrepült az Északi-sarkra?
V: Richard Byrd 1926-ban a Holtidőszámítás segítségével repült az Északi-sarkra, 16 órán át repült, majd visszatért arra a helyre, ahonnan elindult, és csak jégmezők voltak alatta.
Kapcsolódó cikkek
Szerző
AlegsaOnline.com Holtpontos navigáció (dead reckoning) — meghatározás és alkalmazások Leandro Alegsa
URL: https://hu.alegsaonline.com/art/25956
Források
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"